Úgy gondolom, hogy a válasz egy kicsi, de számszerűsíthető igen , van egy nem sík út konfiguráció, amely jobb gáz futásteljesítményhez vezetne bármely két, azonos magasságú pont között. Számszerűen megoldottam egy ilyen optimális utat. Úgy gondolom, hogy szép magyarázatot tudok adni arra, hogy miért van ez, de ez némi munkát igényel, ezért viseljen velem. Igaz, csak 0,01 dollár megtakarításra számíthat az üzemanyagon, ha ilyen optimális utat választ, többé-kevésbé függetlenül a megtett távolságtól.
tl; dr: Ott az optimális sebesség, amelyen haladhatunk, hogy minimálisra csökkentsük az üzemanyag-fogyasztást egy meghatározott távolságon. Ha ezután azt kérdezzük, hogy mi az optimális út két rögzített pont között, feltéve, hogy nulla sebességgel indulunk és végzünk, a válasz nagyjából annyi, hogy meglehetősen gyorsan felgyorsulunk az optimális sebességig, fenntartjuk ezt a sebességet a távolság nagy részében, majd lassítsunk vége. Ha megengedjük a dombokat, a legjobb útnak lesz egy lefelé mutató lejtője, amely segít nekünk felgyorsulni, és egy felfelé mutató lejtő a végén, amely segít lassítani. Ez jobb üzemanyag-hatékonyságot tesz lehetővé.
Ezt a kérdést nagyon érdekesnek találtam, bár kihívást jelentett. Remélem, hogy a következőkben végigvezetem Önt a gondolkodási folyamatomon, és remélhetőleg bemutatok néhány okos technikát és eredményt.
Általános stratégiának azt hittem, hogy az eredeti kérdés túl nehéz. Tehát a tudomány nagy hagyományai szerint elkezdtem könnyebbekre bontani a problémát. Az optimális út meghatározása túl nehéz volt, mivel úgy tűnt, hogy először az optimális sebességprofilt kell tudnom. Tehát, akkor megpróbáltam kitalálni az optimális sebességprofilt egy sík pályához. Ez maga is nehéz volt, ezért inkább azzal kezdtem, hogy megpróbáljam kitalálni az optimális sebességet egy állandó távolságon állandó sebességgel haladó autó számára. Itt kezdjük.
Optimális rögzített sebesség rögzített távolságra
Mindannyian hallottuk, hogy az üzemanyag-hatékonyság maximalizálása érdekében optimális sebesség van utazni. De miért van ez? Végül valamiféle kereskedelemnek kell lennie, ahol büntetést fizetünk azért, ha túl lassan haladunk, és büntetést fizetünk azért, ha túl gyorsan haladunk, így az optimális lehet valahol a kettő között. Könnyű felismerni, miért rossz a böjtölés, minél gyorsabban haladunk, annál többet veszítünk a légellenállástól. A másik oldalon, ha nagyon lassan haladunk, ez szintén nem hatékony, mivel nagyon sok időbe telik, mire elérjük a célunkat, amely során veszítünk az üzemanyagból, ha bejáratjuk az autót és járunk. Amint azt a Mennyire hatékony a gyorshajtás? válaszomban feltártam, egy nagyon egyszerű modell, amely tisztességesen elvégzi a mért üzemanyag-hatékonysági görbéket, feltételezi, hogy az autó által felvett teljesítmény $$ P = A v ^ 3 + P_0 $$ itt a $ \ propto v ^ 3 $ kifejezés a a légellenállás költsége, mivel $ F _ {\ text {air}} \ propto v ^ 2, P \ propto F v \ propto v ^ 3 $ , és a $ P_0 $ az autó bekapcsolása miatti állandó áramveszteségünket jelöli. Amint azt a másik válaszban megmutattam, ez egy megfelelő munkát végez a megfigyelt üzemanyag-hatékonyság modellezésében. a $$ F = A + Bv + Cv ^ 2 $$ erőmodellünk az EPA jelentés szerint (8. o.). Ennek az az előnye, hogy a paramétereiket egy 2004-es Honda Civic DX-hez használhatjuk (99. o.) $$ A = 105.47 \ text {N} \ quad B = 5.4276 \ text {N / mps} \ quad C = 0.2670 \ text {N / mps $ ^ 2 $} \ quad m = 1239 \ text {kg} $$ és valamilyen szintű szerény realizmust kap.
Meg kell még határozni a $ P_0 $ értéket, amelyet beállítottam $ P_0 = 6 \ text {kW} $ annak érdekében, hogy józan értéket kapjunk az optimális sebességünkhöz. Eredményes modellünk az autónk üzemanyag-hatékonysága szempontjából a következőket adja:
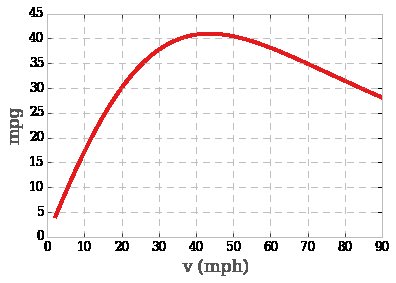
ebben a esetben a csúcsértéke 41 mph. Ez minőségileg egyezik a megfigyelt üzemanyag-hatékonysági görbékkel is, azaz ez a wikipédia ábra vagy ez a automata bejegyzés
Most világosnak kell lennie, hogy ha érdekel tisztességes távolság megtétele esetén az optimális pályánk az lesz, hogy 41 km / h körüli sebességre gyorsulunk, majd az utazás nagy részében fenntartjuk ezt a sebességet, és a végén lelassulunk. Ez biztosítja az optimális kompromisszumot az autó bekapcsolásához szükséges idő és az autónkban tapasztalható különböző súrlódási erők miatti veszteségek között. Ez egészen más karaktert fog adni a válaszomnak, mint Edwardsnak, mivel stratégiája az volt, hogy a lehető leglassabban haladjon a súrlódási veszteségek elkerülése érdekében. Sajnos a végletekig véve ez azt jelentené, hogy rengeteg üzemanyagot pazarolunk el, ha csak be van kapcsolva az autó. biztonságos vagy reális stratégia. A következőkben megpróbálom meglátni, hogy milyen választ kapunk, feltéve, hogy nem kapcsoljuk le az autót, vagy nem végezünk különösebben okos hipermillus trükköket. h2>
Miután kitaláltuk, mi az optimális rögzített sebesség egy rögzített távolságra, szeretnénk kitalálni, hogy mi az optimális sebességprofil egy rögzített távolságra, feltéve, hogy nulla sebességgel indulunk és végzünk. Ez kiderül, hogy az optimális vezérlés problémája.
A probléma formális megállapításához meg kell adnunk az autó állapotát, $ v (x) $ a sebességet két rögzített pont távolságának függvényében $ x = 0, x = X $ . Van egy $ u (x) $ vezérlő változó, amely nagyjából megfelel annak, hogy mennyit nyomunk a gázpedálon vagy a féken. Arra a $ u (x) $ keresésre törekszünk, amely minimalizálja az üzemanyag-fogyasztást, amelyet így fogunk felvenni:
$$ F = \ int dt \, r (v, u) = \ int_0 ^ X dx \, \ frac {r (v, u)} {v} $$ ahol $ r (u, v) $ az adott $ v, u $ üzemanyag-fogyasztás aránya. Autónkat a megadott dinamika írja le. $$ \ dot v = a (u, v) = u - \ frac {A} {m} (v>0) - \ frac {B } {m} v - \ frac {C} {m} v ^ 2 $$ itt vannak a $ A, B, C $ kifejezések, amelyek gördülési ellenállás, forgási súrlódás és légellenállás, a $ u $ pedig az autó által biztosított extra gyorsulás.
Mit vegyünk üzemanyagként fogyasztási ráta? Nagyon sok gondom volt ezzel előállni, de szerintem egy jó definíció: $$ r (v, u) = m v u (u>0) + P_0 $$
Az az intuíció, hogy az üzemanyag-fogyasztásnak arányosnak kell lennie azzal a teljesítménnyel, amelyet az autónak biztosítania kell, az autónk biztosítja a gyorsulást $ u $ , tehát a teljesítmény $ P = mvu $ . De csak akkor fogyasztunk üzemanyagot, ha pozitív gyorsulásunk van. Ha fékezünk, hacsak nincsenek regeneratív fékjeink, ez az energia elvész és nem tér vissza, ezért az üzemanyag-fogyasztás függvényét $ u $ pozitív értékekre küszöbölöm. Egy másik fontos megjegyzés, hogy az autók maximális és minimális értéke $ u $ alkalmazható. Autónk modelljéhez a $ u $ -ot be kell határolni a $ [- b, a] = [ -7,2, 3,2] $ , amelyet 0–60 mérföld / órás gyorsulási időkből ( $ u \ leq a $ ) és féktávolság mérésekből nyertem a honda civics számára. ( $ u \ geq -b $ )
Optimális vezérlési probléma
Ezen a ponton a következőképpen fogalmaztuk meg a problémánkat: probléma a variációk kalkulusában. Minimalizálja az üzemanyag-felhasználást az összes lehetséges gyorsítóprofilon $ u (x) $ , figyelemmel a fizikai és dinamikai kényszerekre.
$$ \ min_ {u (x) \ a [-b, a]} \ int dt \, r (v, u) \ quad \ text {tárgyban} \ dot v = a (v , u), v (0) = 0, v (X) = 0 $$ ezen a ponton, folytathatnánk egy Lagrange-szorzó hozzáadásával az ellenszegüléseinkhez, figyelembe véve a funkcionális deriváltat és megtalálja a rendszer Euler Lagrange-egyenleteinek megfelelő dolgokat. De ez nekem túl nehéz volt. Nem sikerült.
Ezután megpróbálhatjuk megtalálni azokat a feltételeket, amelyeknek az optimális feltételeknek eleget kell tennünk, ha alkalmazzuk Pontryagin minimum elvét, és így dolgozunk ki, de ez megint túl nehéznek bizonyult én.
Tehát inkább válasszunk egy numerikus megoldást, amelyet a dinamikus programozás alkalmazásával találunk meg.
Dinamikus programozás
A lényeg itt az, hogy nem kell az egész problémát egyszerre megoldanunk, ehelyett tegyünk valamit, amely hasonlít egy indukciós bizonyításhoz, megpróbáljuk a problémát a legkisebb darabokra bontani, és megírjuk a megoldást arra a kis problémára egy kicsit kisebb probléma megoldása szempontjából. Ez egyfajta ismétlődést hoz létre, amely a lehető legkisebb probléma megoldásával kombinálva lehetővé teszi számunkra, hogy nyomatékosan kényszerítsük a kívánt problémákat.
Kezdjük azzal, hogy problémánkat még nagyobbra cseréljük. Keressük az optimális útvonalakat bármely köztes $ x $ -tól kezdve, bármilyen közbenső sebességgel $ v $ , és írjuk
$$ F_ {x, v} [u (x)] = \ int_x ^ X dx \, \ frac {r (u, v)} {v} \ quad v (x) = v, v (X) = 0 $$ úgy, hogy $ F_ {x, v} [u (x)] $ span > a $ u (x) $ irányelv $ x = x $ kezdőponttal fogyasztott üzemanyag $ v (x) = v $ és a $ x = X $ végződéssel $ v (X) = 0 $ . Ennek alapján meghatározhatjuk ezeknek az optimális részutaknak a költségét. $$ C (x, v) = \ min_ {u (x) \ in [-b, a]} F_ {x, v} [u (x)] $$
Tehát a $ C (x, v) $ megadja nekünk az üzemanyagot, amelyet a $ x $ span> sebességgel $ v $ a $ x = X $ sebességgel $ v = 0 $ . Úgy tűnik, csak rontottunk az életünkön. Ahelyett, hogy meghatároztuk volna az egyetlen optimális út költségét ( $ C (0,0) $ ebben az esetben), létrehoztuk azt a problémát, hogy megoldunk egy egész optimális pályák. A varázslat következik be. Úgy képzeljük el, hogy a $ x $ és a $ v $ partíciót diszkrét rácsba, $ x_i $ , $ v_i = v (x_i) $ , és próbálja meg megírni a megoldást az egyik rácspontunkra a megoldás a következő rácsponton.
$$ C (x_i, v_i) = \ min \ left \ {\ int_ {x_i} ^ {X} dx \ , \ frac {r (u, v)} {v} \ right \} = \ min \ left \ {\ int_ {x_i} ^ {x_ {i + 1}} dx \, \ frac {r (u, v )} {v} + \ int_ {x_ {i + 1}} ^ {X} dx \, \ frac {r (u, v)} {v} \ right \} $$ , de ez a második kifejezés csak $ C (x_ {i + 1}, v_ {i + 1}) $ , és az integrálunk egyetlen lépés, így: $$ C (x_i, v_i) = \ min \ bal \ {\ frac {r (u, v)} {v} \ Delta x + C (x_ {i + 1}, v_ {i +1}) \ right \} $$
Sajnos előrehaladtunk. Megvan a $ C (x_i, v_i) $ értéke, mint az e lépésben használt üzemanyag és az optimális érték a következő rácsponton. Ennek tudatában, és hogy utunk legvégén $$ C (X, v) = \ begin {esetben} 0 & v = 0 \\ \ infty & v \ neq 0 \ end {esetben} $$
folytathatjuk a $ C (x, v) $ kiszámítását a $ x $ összes értékéhez. Csak meg kell határoznunk, mit értünk $ v $ és $ u $ alatt. Ehhez meg kell győződnünk arról, hogy kielégítjük-e dinamikai korlátainkat, és tisztességesen elvégezzük az integrál közelítését azáltal, hogy egyetlen ponton megkapjuk a $ r $ -ot. Tehát $$ v = \ frac 12 \ balra (v_ {i-1} + v_ {i} \ right) $$ $$ \ Delta x = x_ {i} - x_ {i-1} = \ bal (v + \ frac 12 \ dot v \ Delta t \ right) \ Delta t $$ $$ \ dot v = \ frac {v_ {i} - v_ {i-1}} {\ Delta t} = a (v, u) $$ ezek lehetővé teszik számunkra a $ \ Delta x $ állandóként kezelése és a $ u, r (v, u), a (v , u) $ mindezt a $ v_i $ kifejezésben, majd vegye fel a minimumot a $ összes értékére v_i $ a jobb oldalon. Ez a megközelítés hasonló az ebben a cikkben (doi) alkalmazott megközelítéshez, amely véletlenül egy bonyolultabb modellt hajt végre áttételekkel, kapcsolással és hasonlókkal, és érdemes megnézni.
Dinamikus programeredmények sík terepen
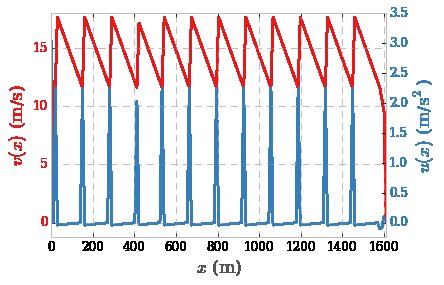
Ezután kódolhatjuk az egészet, és megoldhatjuk az optimális profilokat fix távolságra. 1 mérföld távolságot fogok venni. Ezt kapjuk meg sebesség- és gyorsítóprofiljainkhoz:
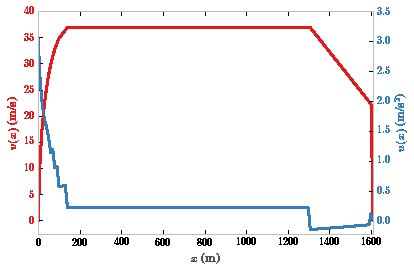
Figyeljük meg, hogy alapvetően három szakaszunk van. Az elején meglehetősen gyorsan felgyorsulunk majdnem optimális sebességig. Ezután a középső részen majdnem optimális sebességgel haladunk a talajtakarás érdekében, majd egy bizonyos ponton haladunk a sebesség csökkentése érdekében, és végül fékezünk, hogy a végén nulla sebesség legyen a vége.
Láthatjuk üzemanyag-felhasználásunkat a távolság függvényében, és kiszámíthatjuk az utazás teljes üzemanyag-fogyasztását és üzemanyag-fogyasztását:
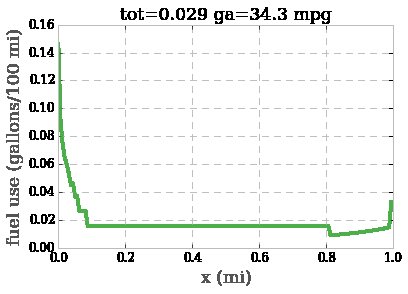
Ebben az esetben 0,29 gallon t használunk, átlagos üzemanyag-fogyasztás 34,3 mpg .
Vegye figyelembe, hogy üzemanyag-felhasználásunk többsége a fő szakaszról származik, optimális sebesség mellett. Az adag miatt nincs semmi, amit meg tudnánk fizetni. Ha reméljük, hogy bármilyen előrelépést kívánunk elérni a megtakarítások felé, akkor ennek a pálya kezdeti részében az üzemanyag-felhasználás csökkentésére kell törekednie. Csak ez az első rész, ahol felgyorsulunk, 0,008 liter benzint vagy körülbelül 0,02 dollárt ér el jelenlegi áron. Ez valóban az egyetlen hely, ahol reménykedhetünk valamiféle előnyökben, így még ha sikerül is jobban teljesítenünk, ez nem lesz sok.
Intuíció a hegyi válaszhoz
Rendben, miután kidolgoztuk, mit kell tennünk sík talajon, most valóban képesek vagyunk megválaszolni a kérdéses kérdést. Mekkora lenne az út optimális kialakítása a két végpontunk között? Van-e valamilyen előny?
Most, hogy felállítottuk a keretrendszert, egyenesen előre megy a numerikus optimalizálási probléma újbóli futtatása, ezúttal a hálózatunknak az út magasságának megfelelő másik dimenziójával, amit hamarosan meg fogunk tenni, de nézzük meg, vajon ki tudunk-e vonni valamilyen intuíciót a sík terepre adott válaszunk alapján.
Vegye figyelembe, hogy az optimális irányítási útnak alapvetően három szakasza van. Az I. szakaszban fel kell gyorsulni a majdnem optimális sebességig, amelyben a legnagyobb üzemanyag-ütést érjük el. Amint felgyorsult a II. Szakasz, fenntartjuk ezt a sebességet, ami kicsi, de állandó és majdnem optimális üzemanyag-fogyasztási költséget jelent nekünk. És végül, amikor a célunkhoz közeledünk, a III. Szakaszban lassulunk, először csaknem felfelé haladva és néhány fékezéssel.
Tehát jobban tudunk járni dombokkal? Nos, mivel autóval van dolgunk, fáj nekünk, ha gyorsulunk a motor használatával, miközben a fékezéshez semmit sem állítunk vissza, ezért ha jobban fogunk menni, akkor tennünk kell valamit a kezdeti gyorsítás ellen.
De csak egy lejtőt használhatnánk a kezdeti gyorsulás eléréséhez. Hagyja, hogy a gravitáció végezze el a munkát helyettünk, és semmilyen üzemanyag-büntetést nem róunk ki.
A fizika nagyon hasonlít egy klasszikus bemutatóhoz, amelyet az intromechanika órákon mutatnak be. Fontolja meg a következő beállítást:

Két rámpánk van. Az egyik egy szelíd, állandó lejtésű, az egész pedig egy, a közepén mártással. Nagy piros betűkkel írva a dologra: "AZ ENERGIA TARTÁSA". A hallgatóknak feltett kérdés: melyik labda ér el először a végére? Gondoljon bele egy pillanatra, mielőtt lefelé görgetne.
Íme az eredmény:

Figyelje meg, hogy a lesüllyedt labda jól veri az első labdát . Ez a bemutató általában azért szórakoztató, mert a diákok mind azt mondják, hogy a bálok ugyanannyi időt vesznek igénybe, főként az egész készülékre írt "ENERGIATARTÁS" okozta felszólítás miatt. De bár az energia megtakarított, a két pont közötti utazáshoz szükséges idő nem az.
Mivel az üzemanyag-veszteség egy része állandó energia $ P_0 $ amiatt, hogy autónk be van kapcsolva a modellünkbe, lényegében ugyanannak a kialakításnak profitálhatunk. Használja a gravitációt, hogy csökkentse az A-ból B-be haladáshoz szükséges időt, és segítsen a majdnem optimális sebesség elérésében, és így talán megtakaríthatunk egy kis üzemanyagot.
Különösen, amint azt egy pillanattal ezelőtt javasoltuk, az igazi trükk az lenne, ha megpróbálnánk enyhíteni a kezdeti gyorsulásunk nagy üzemanyagköltségét az elején. Ha csak egy lejtős utat használhatnánk felgyorsításunkhoz, akkor csak tartsuk fenn az állandó, majdnem optimális sebességet a pálya nagy részén, majd hajtsunk le a végén, ahol ismét a gravitáció segítene fékezni anélkül, hogy saját magunk kellene alkalmaznunk.
Valójában nézzük meg az optimális utunk integrált gyorsulását a távolság függvényében:
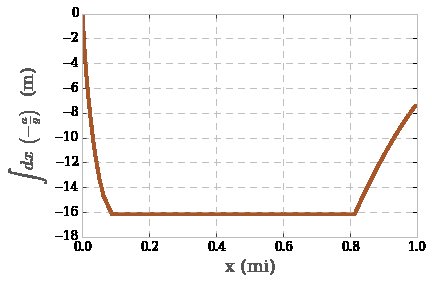
Itt még át is osztottam $ g $ , így autónk ugyanolyan gyorsulási profilt érezhet, mint a sík terep esetében az optimális pálya.
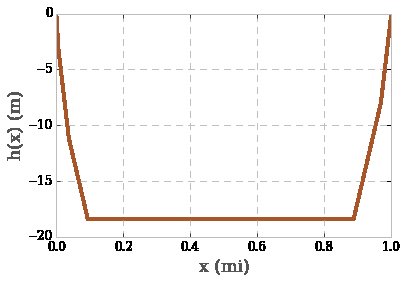
Valóban optimális utunknak minőségileg így kell kinéznie. Kezdeti lefelé irányuló lejtőn fogjuk az autót majdnem optimális sebességre felgyorsítani, majd ezt a sebességet a pálya nagy részében megtartjuk. Amikor a végére érünk, a felfelé eső lejtőt használjuk az autó lelassításának elősegítésére. Figyelje meg, hogy az integrált gyorsulásunk nem egészen $ h = 0 $ értékre képes visszaállítani. Ez súrlódó veszteségeinknek tudható be, és ez azt jelenti, hogy ha megpróbálunk lefelé süllyedni, akkor a végén némi gyorsulást kell bedobnunk annak érdekében, hogy ez visszaálljon.
lapos pályán, a végén nem kellett extra üzemanyagot használnunk, mivel fékeztük. Itt a végén adnunk kell némi óhajt, de csak a töredéke szükséges ahhoz az üzemanyaghoz, amely a lapos tokban volt, hogy felgyorsuljon. Ennek a domb dolognak a nyelvén a lefelé eső lejtő gyorsaságra késztet minket, és bár igaz, hogy nem jövünk vissza egészen felfelé, minden bizonnyal vissza fogunk jutni az utolsó hegyre. / p>
Most dinamikus programunk kibővítésével számítsuk ki az út optimális útvonalát.
Optimális dombtervezés
Ugyanazt a numerikus technikát fogjuk használni, amelyet korábban használtunk, de egy új vezérlő változóval $ h (x) $ , az utunk magasságának függvényeként távolság. Módosítanunk kell a dinamikai kényszerünket, ezúttal
$$ \ dot v = a (v, u, h) = u - \ frac { A} {m} (v>0) - \ frac {B} {m} v - \ frac {C} {m} v ^ 2 - g \ frac {dh} {dx} $$ , ahová felvettük egy másik kifejezés a gyorsulásunkra, amelyet utunk alakja ad meg. Üzemanyag-felhasználásunk változatlan marad, mivel csak a gázpedálunk használatával jár üzemanyagköltség. De most meg kell oldanunk a nagyobb dinamikus programot:
$$ C (x_i, v_i, h_i) = \ min \ left \ {\ frac {r (v, u, h)} {v} \ Delta x + C (x_ {i + 1}, v_ {i + 1}, h_ {i + 1}) \ jobb \} $$ a fentiekhez hasonlóan a dinamikus korlátjainkat is ugyanúgy előírja, de most a minimalizálásunk kétdimenziós minimalizálás lesz a jelölt sebességeivel és magasságával szemben. Mindkét esetben a program továbbra is fut, csak még több időbe telik, és megtaláljuk az optimális utunkat :
Ami őszintén néz ki, szép hasonló ahhoz, amit intuíciónk sugallt. Mint korábban, megnézhetjük az optimális $ v (x), u (x) $ :
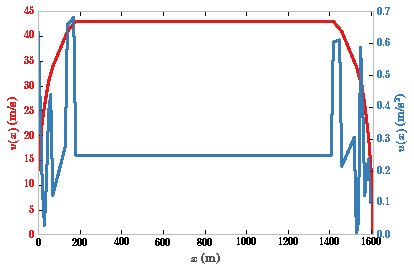
Ahol a sebességprofilunk elég hasonlónak tűnik. Gyorsítónk némi ostoba viselkedést mutat, de általánosságban megvannak azok a trendek, amelyekre számítottunk. Hagytuk, hogy az autó többé-kevésbé siklhasson lefelé a dombról, majd állandó, optimális sebességet tartsunk fenn, majd hagyjuk, hogy a domb lelassítson minket, de a végén adjunk hozzá egy kis levet. az üzemanyag-felhasználás ebben az esetben:
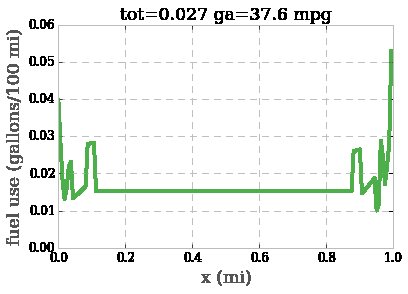
és a TADA, valamivel kevesebb üzemanyagot használunk, 0,027 gallon t, ami megfelel az 37,6 mpg ha megengedjük, hogy az út megtalálja a maga optimális konfigurációját.
Ez 0,002 gallonnal kevesebb, mint a sík terepváz, vagy körülbelül fél centnyi gáz a jelenlegi áron. Ennek a megtakarításnak többé-kevésbé függetlennek kell lennie attól a távolságtól is, amelyet remélni szeretnénk, mivel mindkét esetben hosszú időnk van, amikor majdnem optimális sebességgel haladunk, a különbség éppen abban volt, hogyan próbáljuk mérsékelni a kezdeti gyorsítson fel lapos terepes esetünkből.
Következtetés
Igen enyhébbet , kb. 1 centtel jobban tud. A trükk az, hogy hagyja, hogy az út felgyorsítsa az autót, majd csaknem optimális sebességet tartson fenn az út nagy részében, és hagyja, hogy a domb a végén lassítson le. Ez lehetővé teszi, hogy kissé előrébb jöjjön.
Az eredmények előállításához használt összes kód IPython Notebookként érhető el.
Nagyon jó kérdés.
Hivatkozások:
- előző válasz az üzemanyag-hatékonyságról állandó sebességgel
- EPA-jelentés az autó hatékonyságáról pdf
- Megjegyzések az optimális vezérléshez pdf
- Gépkocsik optimális ellenőrzése az üzemanyag-takarékosság érdekében doi
- IPython-kódfüzet ehhez a válaszhoz ipynb viewer
A függelék: Hypermiling
Amint Floris javasolja a megjegyzésben, érdekelhet minket abban, hogyan változik a sztori, ha megengedjük autóvezetőnknek, hogy megpróbáljon maximálisan hatékony lenni és kikapcsolja a motorját, amikor nem használják. Megoldhatjuk ezt az esetet is. Valójában modellezhetjük ezt a forgatókönyvet az üzemanyag-fogyasztási függvény módosításával.
$$ r (u, v) = \ left (mvu + P_0 \ right) (u>0) $$
Most már valójában nem szabunk ki büntetést, ha nem hajtunk végre gyorsulást a motorunkból.
Lapos pályánk esetében az optimális stratégia válik :
Úgy, hogy sofőrünk csak impulzusokként kapcsolja be a motort, és az út legnagyobb részében másfelé halad. Ez valójában csaknem a felére csökkenti az üzemanyag-fogyasztásunkat:
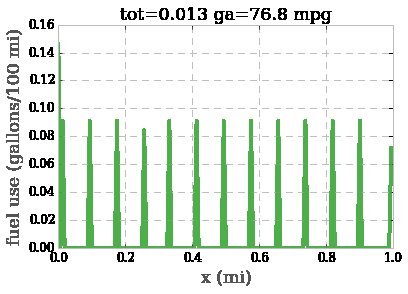
csak 0,013 gallon t használ, vagy átlagos üzemanyag-hatékonyságot ezen az útvonalon: 76,8 mpg .